Spacecraft Controllers

Gimbal Control Electronics (GCE)

The high-reliability Gimbal Control Electronics System controls the motion of two or more motors, such as used in solar array actuators and antenna gimbals.
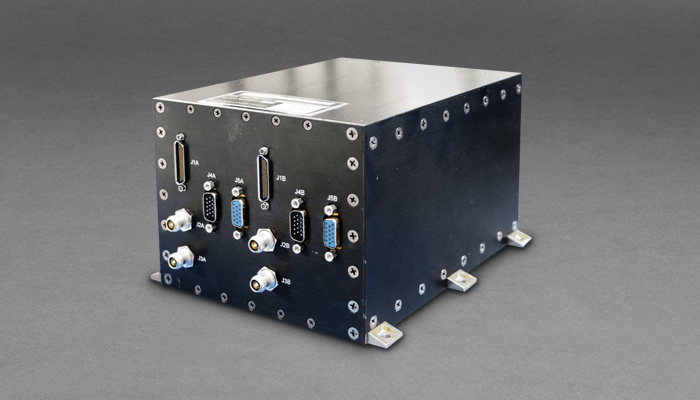
Rikishi Electronics Unit (REU)

The Rikishi Electronics Unit (REU) is a Robotic Arm Controller designed to drive up to nine separate servo motors (joints), such as found on robotic arms or articulated structures. The REU provides a platform for command and telemetry processing, execution of motor control commands and algorithms, execution of general purpose commands, and storage for volatile and non-volatile data.
The REU is composed of (1) communication board (COMM) and (9) motor controller boards (MCBs) integrated into a 10 slot 3U chassis. Spacecraft bus power (28 VDC) is applied directly to the REU backplane via its rear 8-pin power connector. There are chassis mounted DC/DC converters that provide regulated power from the 28 VDC spacecraft bus.
The spacecraft communicates to the REU via RS-422. An ‘emergency disable’ and ‘emergency hold’ discrete input is provided via the COMM board. The REU is designed as a single-string system without explicit redundancy. The (1) COMM board and the (9) MCBs are all on the primary side of the 28 VDC spacecraft bus. The COMM board provides isolated 5 V power required to power the COMM devices that are on the secondary side.
Missions: DARPA/MDA SUMO and Phoenix Programs
Electronic Control Unit (ECU)

The Moog 2-channel Electronic Control Unit (ECU) is comprised of 2 hybrid stepper motor controllers, an EMI filter, and 6 analog pass-throughs for telemetry. The ECU enclosure has been designed to allow 2 ECU’s to be stacked to form a 4-channel ECU. The ECU contains all power conditioning, pulse sequencing and output driver stages necessary to drive two 3-phase motors. The system electrical interface consists of power and command input lines, output motor drive lines and telemetry outputs.
Missions: ORBVIEW, ROCSAT, KOMPSAT