
Motion Simulation Hexapods
Jump To:
Overview
Literature
Related Products
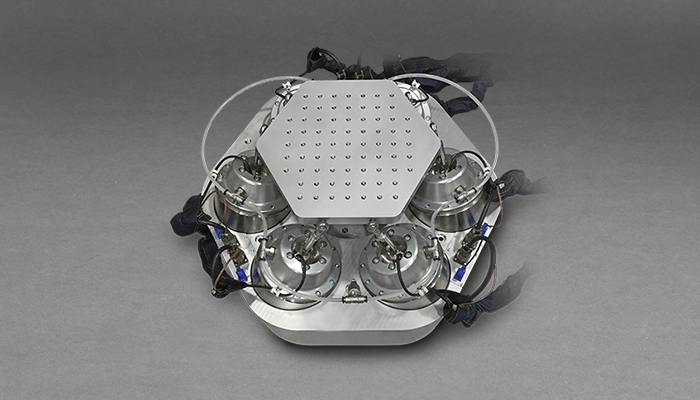
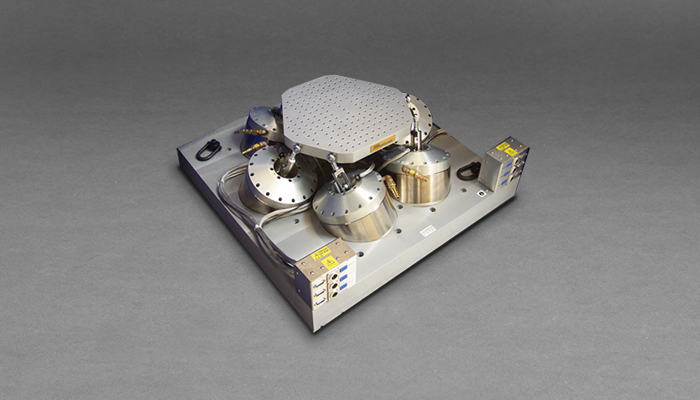
The HX-M300 and HX-M350 models share similar designs and architectures; the HX-M300 is more compact, while the HX-M350 supports larger payloads. Moog offers custom control system tuning to meet unique requirements. 6-axis motion simulation hexapods find wide applications in aerospace testing including satellite jitter simulation and component vibration testing.
APPLICATIONS
- Jitter simulation for optical platforms
- Hardware-in-the-loop simulation
- Missile tracker simulation
- Simultaneous multi-axis vibration testing
- Lasercom line-of-sight verification
- Disturbance simulation for cryocoolers, stepper motors, etc.
- Fatigue testing
Performance Characteristics


| Model | HX-M300 | HX-M350 |
| Payload mass | Up to 50 kg | Up to 180 kg |
| Dimensions | 564 mm D x 330 mm H | 914 mm L x 914 mm W x 330 mm H |
Range of motion1
| HX-M300 | HX-M350 | |
| X (lateral) | ±15 mm | ±20 mm |
| Y (longitudinal) | ±15 mm | ±22 mm |
| Z (vertical) | ±10.5 mm | ±10.5 mm |
| Roll | ±2.3˚ | ±2.5˚ |
| Pitch | ±2.3˚ | ±2.5˚ |
| Yaw | ±4.8˚ | ±4.8˚ |
Minimum incremental step size
| HX-M300 | HX-M350 | |
| X (lateral) | 1 μm | 1 μm |
| Y (longitudinal) | 1 μm | 1 μm |
| Z (vertical) | 0.5 μm | 0.5 μm |
| Roll | 5 μrad | 1 μrad |
| Pitch | 5 μrad | 1 μrad |
| Yaw | 7 μrad | 1 μrad |
| HX-M300 | HX-M350 | |
| Disturbance frequencies2 | >500 Hz | >500 Hz |
Electrical power
| HX-M300 | HX-M350 | |
| Standby | 350 W | 350 W |
| Peak | 1500 W | 3000 W |
| HX-M300 | HX-M350 | |
| Actuation type | Voice coil | Voice coil |
| Sensor type | Linear encoder | Linear encoder |
1. The ranges of motion of the six axes are interdependent. Listed values represent the maximum range with all other axes at their zero positions and the center of rotation at the center of the payload interface.
2. Closed-loop bandwidth depends on the axis and payload mass.